Omkar Patil
PhD Student working on robot learning in the Logos Robotics Lab @ASU

Hi there! I’m a PhD student @ ASU working in the Logos Robotics Lab headed by Dr. Nakul Gopalan. My research focus is compositional robot learning, where I develop methods that leverage the principle of compositionality for robot manipulation. I am also broadly interested in policy improvement, that is developing methods that improve pre-trained policy performance on downstream tasks.
I’m looking for internships in Summer 2027! In Fall 2025, I spent a semester at RAI Institute as a part of the Compose team, working on policy improvement.
I completed my undergraduate and master’s degrees in Mechanical Engineering and Robotics at IIT Madras (India), where I worked with Dr. Anurag Mittal for my master’s thesis exploring the applications of capsule networks. Before starting my PhD, I spent 3 years at Wells Fargo where I did a variety of research in NLP.
Apart from my work, I enjoy hiking and have done several extensive hikes in the Himalayas and plan to do some more in the US! I have a strong liking for landscapes and nature.
news
| Jul 14, 2026 | I’m co-organizing the Compositional and Modular Learning in the Era of Scaling in Robotics workshop at IROS 2026. Consider submitting your work! |
|---|---|
| Jul 14, 2026 | StageCraft: Execution Aware Mitigation of Distractor and Obstruction Failures in VLA Models (StageCraft) has been accepted at IROS 2026! I will be presenting it in Pittsburgh. |
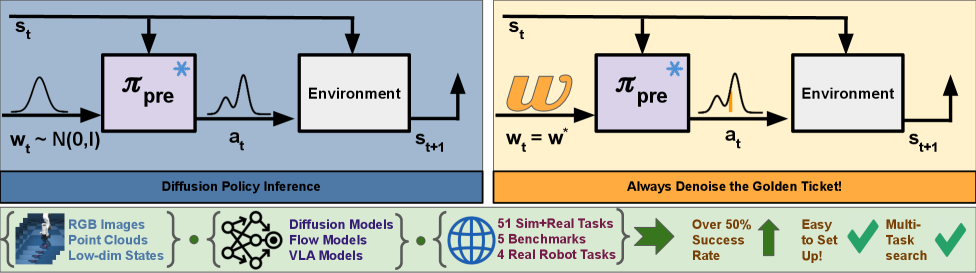
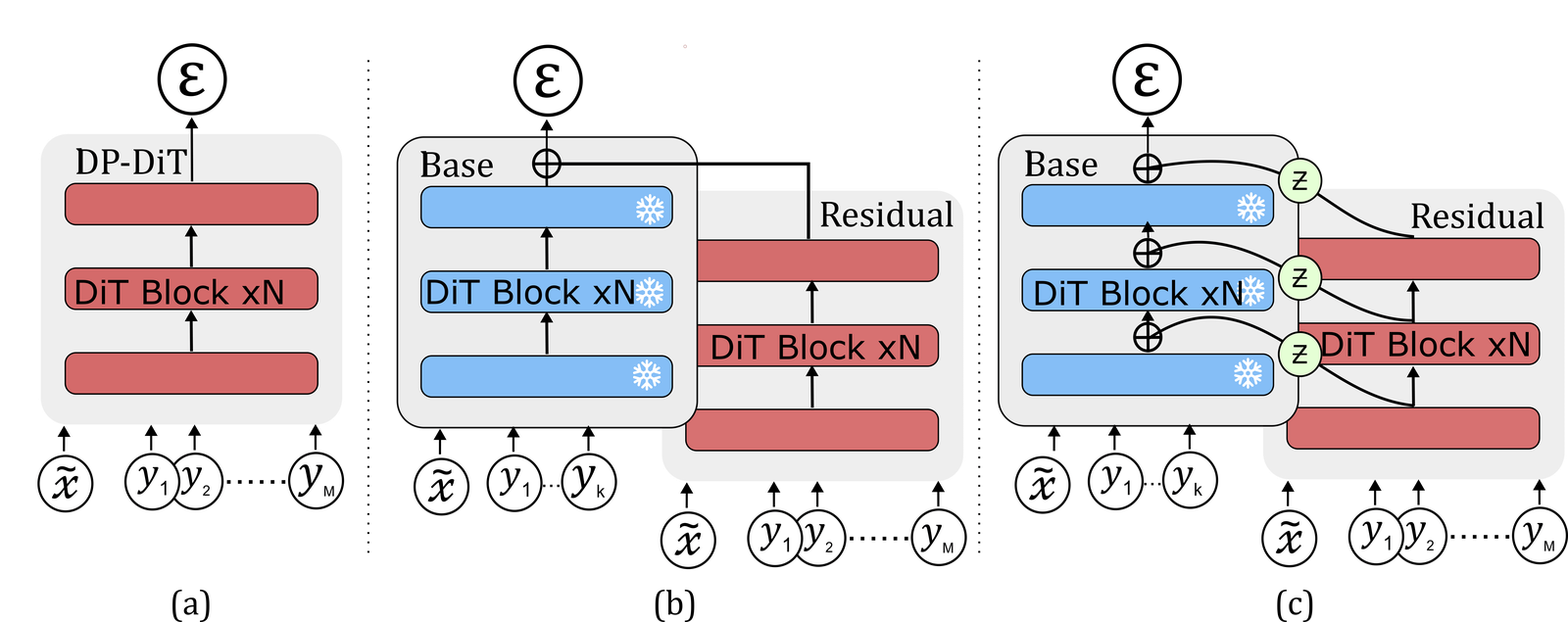
| Jun 01, 2026 | Factorizing Diffusion Policies for Observation Modality Prioritization (FDP) has been selected for an oral presentation at ICRA 2026! I will be presenting it in Vienna. |
| Feb 01, 2026 | I have two papers- Factorizing Diffusion Policies for Observation Modality Prioritization (FDP) and PokeNet: Learning Kinematic Models of Articulated Objects from Human Observations (PokeNet) accepted at ICRA 2026! |
| Sep 08, 2025 | I’m starting my Fall internship in the Compose team at RAI Institute (BDAI) with Eric Rosen and Sebastian Castro! I am excited to work on long horizon manipulation. |
latest posts
| May 10, 2024 | Explaining Life from the Lens of Reinforcement Learning |
|---|---|
| Mar 31, 2020 | COVID Contact Tracing Explained — Corona Kavach |
selected publications
-
 Compositional LearningFactorizing Diffusion Policies for Observation Modality PrioritizationIEEE International Conference on Robotics and Automation (ICRA), 2026
Compositional LearningFactorizing Diffusion Policies for Observation Modality PrioritizationIEEE International Conference on Robotics and Automation (ICRA), 2026